ロボットオペレーターという職業をご存知でしょうか?
かつてはドローンを操縦したり、工場の生産ラインを監視したりする役割を指していました。しかし、現在、ロボティクスおよびAI開発の文脈においては、AIモデルに正解の動きを示す役割を担う職業を指すようになりました。
2017年にマッキンゼー・アンド・カンパニーによって発表された報告書では、2030年までに全世界の労働者の14%がロボットによる自動化による人間の失職や職務転換が増加するということが示されています。
ロボットオペレーターもロボットによって自動化が進む中で、仕事を失う可能性が高いのでは?と考える方もいらっしゃるかもしれません。しかし、ロボットによる自動化が推進されている中で、実は、ロボットオペレーターの需要は高まりを見せているのです。その背景として、最近よく耳にするようになったフィジカルAIが大きく関係しています。
今回の記事では、なぜロボットオペレーターが今求められているのかに焦点を当てつつ、フィジカルAI開発におけるロボットオペレーターの役割について詳しく解説いたします。ぜひ最後までご覧ください。
目次
従来のロボットオペレーター
ロボットオペレーターとは、これまではその名の通り、ロボットを遠隔操作する職種を指していました。
国土交通省発行の「国土交通白書2023」では、「ロボットオペレータ」という職種が紹介されており、「現場の重機やロボットを遠隔で操作することにより、インフラ整備や維持管理を担うプロフェッショナルとして、若い人が憧れ、魅力のある職種となっている。」と説明しています。
2023年当時は、人間が重機を遠隔ではなくそのまま操作するフェーズから、遠隔でロボットには難しい操作や判断の場合に人間が手伝うというフェーズに移行しつつあるという状況でした。自動化において、完全にロボットに任せきりにできず、ロボットの補助を人間が行うという仕事の役割をロボットオペレーターが担っていました。
なぜ、今ロボットオペレーターが求められているのか
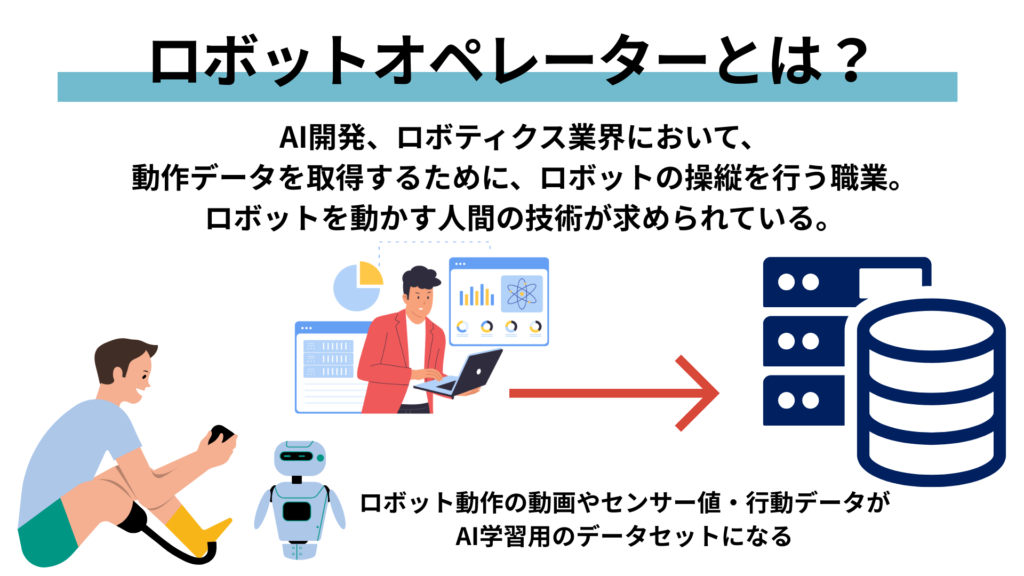
2025年〜2026年現在、ロボットオペレーターは、特に、ロボティクスおよびAI開発の文脈において、その定義は「AIモデルに正解の動きを示す役割を担う職業」へと劇的に変化しています。
つまり、自動化のためのロボットを現場で助ける存在から、完全自動化ロボットを作るための影の立役者として欠かせない職種になっているのです。
フィジカルAI時代のロボットオペレーター
フィジカルAIは、AIを組み込んだロボットが、センサーやカメラ、周辺機器と接続して、現状を認識して自律的に行動を選択するAIシステム全体のことを指します。
その活用用途は産業用〜家庭用まであらゆる場所で活用されることが期待されています。産業用では、製造施設や倉庫などでの導入が想定されており、搬送装置、検査機、MES(製造実行システム)・WMS(倉庫管理システム)などのシステムと連携し、決まったレールだけではない非構造化環境において人間同様に動作するよう開発・実証実験が進められています。
ここでは詳細は省きますが、技術的にフィジカルAIを支えているのが、VLAモデルというAIモデルです。Vision(視覚)・Language(言語)・Action(行動)を単一のニューラルネットワーク内に統合するマルチモーダル基盤モデルで、これにより、環境を認識し、行動計画を考え、実行することができるのです。
つまるところ、ロボットオペレーターは、このモデルの学習のための教師データを作成する職種ともいえます。
VLAモデルについて詳しくはこちらをチェック
ソフトウェア2.0への転換とロボットオペレーターの役割
フィジカルAIは、デジタル空間で作用してきたAIが物理世界で動くようになるという点で、AIとロボティクスの融合とも言えるでしょう。
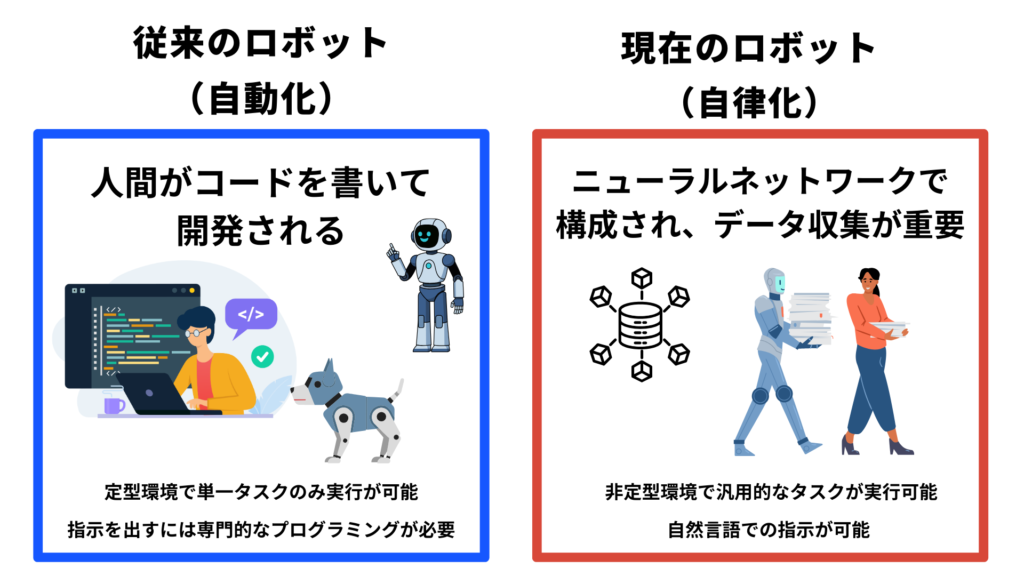
ロボティクス業界に関しては、現在、人間がコードを書くソフトウェア1.0から、データがシステムの振る舞いを決定するソフトウェア2.0への歴史的な転換点にあります。現在、ロボットがフィジカルAIを搭載して自律性を獲得するために必要なのは、従来のような膨大なプログラミングではなく、高品質なデータが必要なのです。
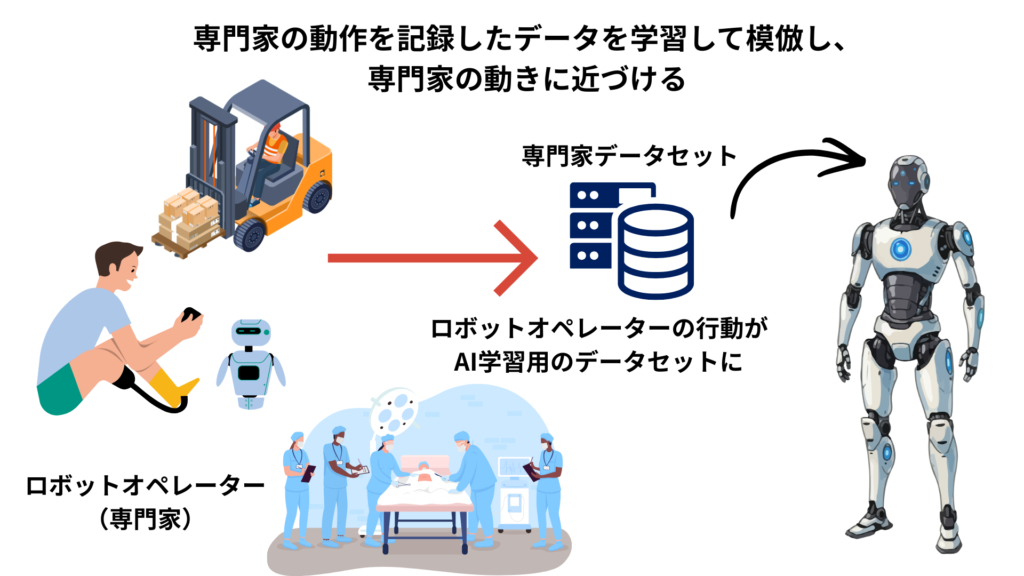
この状況において、ロボットオペレーターは、従来のプログラマーに代わるような形で、AIが模倣すべき模範的な行動をデータによって提示することで、自律的な物理世界での知能を構築するのを支えています。
フィジカルAIについてはこちらをチェック
ロボットオペレーターは実際にどんなことをしているか
ロボットオペレーターがAIに技術を伝授するプロセスは、主に模倣学習(Imitation Learning)という手法に基づいています。これは、人間が見せるお手本をAIモデルが学習し、その振る舞いを再現するプロセスと言えるでしょう。
主要な模倣学習アルゴリズムとオペレーターの関わり
VLAモデルの学習のための模倣学習にはいくつかのアプローチがあり、それぞれにオペレーターの役割が異なっています。
行動クローニング(Behavioral Cloning: BC):専門家の「状態」と「行動」のペアを直接学習させる手法。実装は容易だが、一度ミスをすると修正できず破綻する共変量シフトという弱点がある。これを防ぐには、オペレーターが膨大な失敗パターンのリカバー例を示す必要がある。
敵対的模倣学習(GAIL):GAN(敵対的生成ネットワーク)の枠組みを用い、ロボットが「専門家と見分けがつかない」行動を取るように識別器と競わせる手法。未知の状態に対しても堅牢だが、計算コストが高いという課題がある。
データ融合(DAgger):ロボットが実際に動いている最中に人間が介入し、その瞬間に取るべき正しい行動を後付けでラベル付け(アノテーション)していく対話型学習手法。オペレーターは常にフィードバックを与え続ける必要があるが、最も効率的に学習を収束させることができる。
ロボットオペレーターによるデータ生成の4つの具体的アプローチ
ロボットオペレーターが動作データを生成する手法は、使用するデバイスや環境によって以下の4つに分類されます。
テレオペレーション(遠隔操作):VRゴーグルやコントローラーを用いて、リアルタイムでロボットを操縦し、関節の回転角度や手先の座標を記録する。触覚フィードバックを用いることで、力加減などの繊細なスキルもデータ化できるため、現在の開発において最も主流になっている。
シミュレーション内での生成(Sim2Real):デジタルツイン上で仮想ロボットを操作する。短期間で数百万件のデータを収集でき、ドメインランダマイゼーション(物体の色や摩擦係数をあえて変える)手法を併用することで、現実世界への適応力を高める 。
キネスティック・ティーチング:ロボットの腕をオペレーターが直接掴んで動かす手法。プログラミング知識が不要で直感的だが、大型ロボットや危険環境での実施には制約がある。
ビジョンベース・シャドイング:カメラで撮影した人間の動作を解析し、ロボットの動きへと変換する方法。特殊な装置を使わずにスマートフォンの映像からも学習可能なため、大規模なデータセット構築の鍵として期待されている。
熟練したロボットオペレーターによるデータが欠かせない!
従来のロボット制御のような決められた用途・環境での限定された条件の中でどのように動くかが重視されてきました。
しかし、フィジカルAI時代には、人間的な、広範囲に及ぶ認知や判断を行えることが重要で、多様な環境に適応し、柔軟な判断とそれに合った行動が行える汎用性がロボット基盤モデル(RFMs)には求められています。
そのために必要なデータは下記のようなデータで、ほとんどがインターネット上にはない、現場からしか取得できないデータです。
取得が難しいデータは世界モデルで生成される
フィジカルAIの文脈では、「世界モデル」という言葉がよく使われます。
AI開発において最も大きな壁となっていたのは、現実では滅多に起こり得ないことのデータの取得とそれをシミュレーション方法でした。事故状況下での対応方法など、現実世界でデータのために再現することが難しい場合があります。
その場合、現実と同じような物理法則を備えた世界モデルでデータを生成し、シミュレーションを行うことで解決できるようになりました。
世界モデルについてはこちらをチェック
ロボットオペレーターという職業の実態とは?
日本企業ではまだあまり求人が出ていないものの、海外の企業ではたびたび募集しているのを見かけます。
様々な求人情報をもとにどのような特徴があるのか、よく見かける文言を記載します。
仕事内容
テレオペレーション装置を用いてロボットを動かし、洗濯物を畳む、ネジを締める、ジャムの瓶を開けるといった多様なタスクを遂行する。AIの動作ログを確認し、不適切な挙動やバグがあれば報告する。自身の動作データが正確に学習システムにアップロードされているかを管理する。
身体的・技術的要件
8時間シフトの間、立ち作業やVR環境での操作を継続できる体力が求められている。
約9〜11kgの専用ギアを装着することもある。ゲーミング経験(コントローラー操作)や精密な電子工作、実験環境での作業経験が有利に働く。ビデオゲームのシャドイングのように、ロボットの特性を理解して最適な軌道を描ける空間把握能力が求められる。当初は反復的で単調な作業に感じられる側面もあるが、AIの知能を自らの手で育て上げるという研究的側面への熱意が重視される。
待遇とキャリアパス
時給は25ドルから35ドル(約3,800円〜5,300円)程度で、エンジニアリングチームへのキャリアアップの道も開かれていることもある。
あくまでも上記は一例ですが、ロボットオペレーターには熟練した技術が必要な側面もありますが、一般家庭向けの製品のための求人では高い技能を求められないこともあります。
フィジカルAIの実用化にはロボットオペレーターの技術が求められている
LLMではインターネット上の膨大なテキストデータで学習がされてきましたが、フィジカルAIは、現実世界のデータが必要となります。インターネット上にあるデータ以上に取得が難しく、ロボットオペレーターによるデータ生成が求められています。
しかし、AI・ロボティクス業界での需要がますます増えている中、ロボットオペレーターの成り手が不足している、または、新しい仕事としての「ロボットオペレーター」という仕事が世間で知りわたっていないという状況があります。
この記事をきっかけにロボットオペレーターが多くの方に知っていだたけると嬉しいです。
最後に
今回の記事では、ロボットオペレーターについて解説いたしました。
フィジカルAIの発達により、ロボティクスにおけるブレイクスルーと技術の一般化が予想されています。
一方で、データの不足により開発が進まないという側面がフィジカルAI開発の課題となっています。
AIが発達し社会実装されていくためには、AIにとって思考の資源となるためのデータが重要であることは、これからも変わりません。そのためにはロボットオペレーターの存在が欠かせないのです。
harBest(ハーベスト)by APTOでは、AI開発に必要なデータセントリックなアプローチでゼロからAI開発のサポートをしています。
AIに欠かすことのできないLLM/SLM/ドメイン特化型モデル開発やフィジカルAIに欠かせないデータの作成や、アノテーションについて、お客様のビジネス領域やご要望に合わせてご依頼を承っております。
また、データセットの配布、販売も行っております。高品質かつ専門的なデータセット作成、AI開発にお困りの場合、ぜひご相談ください。 下記よりお問い合わせをお待ちしております。
